Mit der starken Entwicklung der Elektronikindustrie ändert sich die Positionserkennung einiger Strukturkomponenten langsam von der ursprünglichen Kontaktmessung zur berührungslosen MessungHall-Positionssensor und Magnet.Wie können wir entsprechend unseren Produkten und unserer Struktur einen geeigneten Magneten auswählen?Hier führen wir eine einfache Analyse durch.
Zuerst müssen wir das Magnetmaterial bestimmen.Derzeit werden Samarium-Kobalt-Magnete und Neodym-Eisen-Bor-Magnete häufig in Hall-Positionssensoren verwendet.Der Hauptunterschied zwischen den beiden Magneten besteht darin, dass NdFeB-Magnete bei gleichem Volumen stärker sind als Samarium-Kobalt-Magnete;die thermische Auslenkung von Samariumkobalt ist kleiner als die von Nd-Fe-B;Die Oxidationsbeständigkeit von Samariumkobalt ist stärker als die von Nd-Fe-B, aber im Allgemeinen befindet sich auf der Außenseite des Magneten eine Beschichtung, die das Oxidationsproblem lösen kann;Der Samarium-Kobalt-Magnet hat eine bessere Temperaturbeständigkeit als der NdFeB-Magnet, aber der Temperaturbeständigkeitswert für beide Magnetmaterialien kann mehr als 200 °C erreichen.Daher sollten wir bei der Auswahl des Magnettyps diesen in Kombination mit dem Preis-Leistungs-Verhältnis, der Arbeitstemperatur und der Arbeitsumgebung bewerten.Im Allgemeinen kann NdFeB häufiger verwendet werden, vor allem weil es die besten Magnetfeldeigenschaften aufweist.Bei Arbeiten in einem weiten Temperaturbereich wird jedoch aufgrund seiner geringen thermischen Drift die Wahl eines Samarium-Kobalt-Magneten empfohlen.
Darüber hinaus müssen wir einige grundlegende Parameter des Magneten bestimmen.Anhand der Testpositionsinformationen und der Bewegungsrichtung des Objekts bestimmen wir, ob die Magnetisierungsrichtung des Magneten diametral oder axial ist.Darüber hinaus wird bestimmt, ob a ausgewählt werden sollquadratischer Magnetoder einZylindermagnetentsprechend der Installationsstruktur.Natürlich müssen wir manchmal die Form des Magneten an die Struktur anpassen.Es gibt noch einen weiteren Anforderungsfaktor bezüglich des Magnetflusses, der uns bei der Magnetauswahl immer am Herzen lag.Tatsächlich müssen wir es in den folgenden zwei Aspekten analysieren:
1. Die vom Hall-Positionssensor selbst induzierte Magnetfeldstärke und die Reichweite des induzierten Magnetfelds in jede Richtung werden im Sensordatenbuch deutlich angegeben.
2. Der Abstand zwischen dem Magneten und dem Sensor selbst wird im Allgemeinen durch die Produktstruktur bestimmt.Anhand der beiden oben genannten Aspekte und der Magnetfeldänderungskurve in der Abbildung unten als Beispiel können wir die Magnetfeldstärke des erforderlichen Magneten bestimmen.
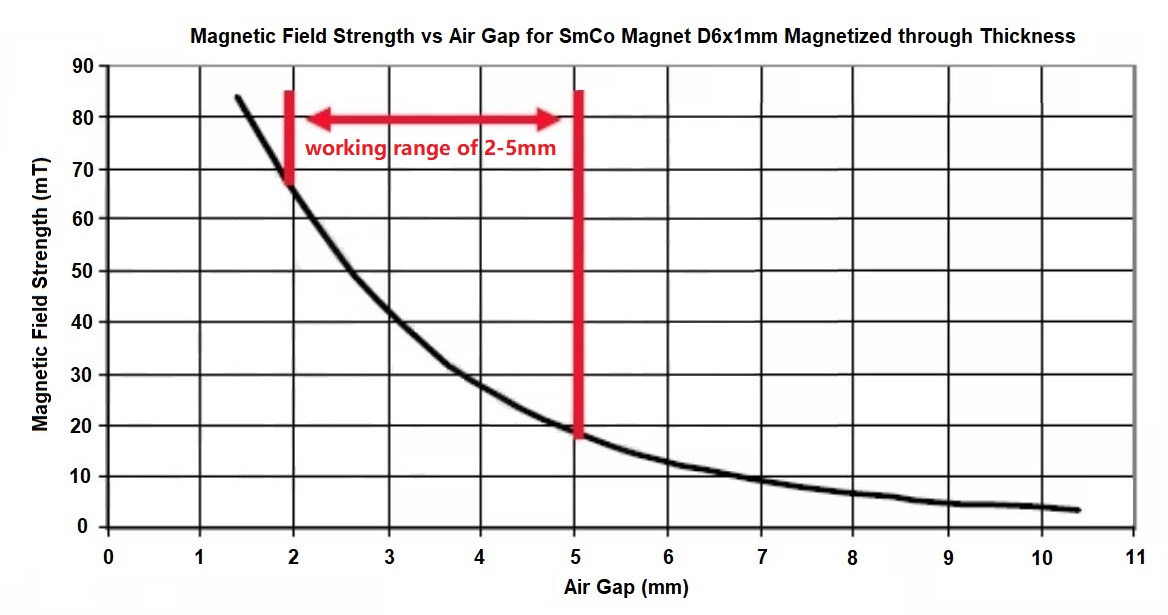
Schließlich müssen wir verstehen, dass dies nicht bedeutet, dass der Magnet so weit vom Sensor entfernt sein kann, solange das Magnetfeld die Reichweitenanforderungen des Sensors erfüllt.Obwohl der Sensor selbst über eine Kalibrierungsfunktion verfügt, müssen wir verstehen, dass die Verteilung des Magnetfelds selbst nur schwer linear oder nahezu linear gewährleistet werden kann, wenn der Magnet zu weit vom Sensor entfernt ist.Dies bedeutet, dass mit der Positionsänderung und der nichtlinearen Verteilung des Magnetfelds selbst die Sensormessung komplex und die Kalibrierung sehr komplex wird, sodass das Produkt keine Reduzierbarkeit aufweist.
Das Obige ist nur eine einfache Analyse der Magnetauswahl in Hall-Sensor-Anwendungen.Wir hoffen, dass es Ihnen hilfreich sein wird.Wenn Sie während des Entwicklungsprozesses weitere Fragen haben, kontaktieren Sie uns bitte,Ningbo Horizon Magnetics.Wir können die weitere Kommunikation übernehmen und Ihnen technischen Support bieten.
Zeitpunkt der Veröffentlichung: 12. August 2021