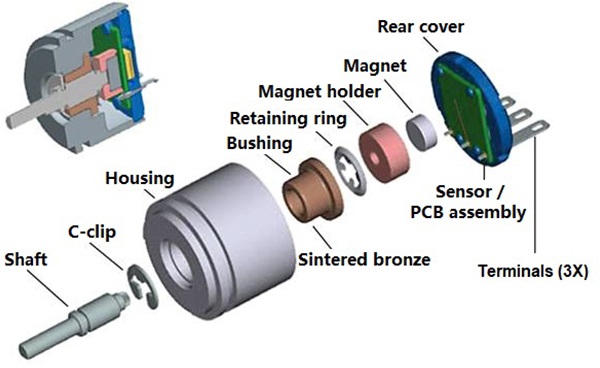
Wenn Sie die Möglichkeit haben, einen magnetischen Drehgeber zu zerlegen, sehen Sie in der Regel einen inneren Aufbau wie oben dargestellt. Der magnetische Encoder besteht aus einer mechanischen Welle, einer Gehäusestruktur, einer Leiterplattenbaugruppe am Ende des Encoders und einem kleinenScheibenmagnetrotierend mit der Welle am Ende der mechanischen Welle.
Wie misst der magnetische Encoder die Rückmeldung der Drehposition?
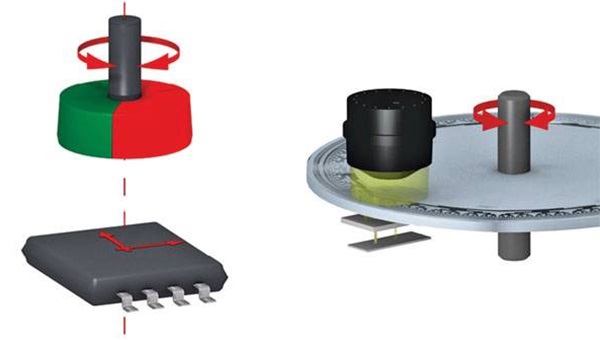
Hall-Effekt: die Erzeugung einer Potentialdifferenz über einem Leiter, der elektrischen Strom durchläuft, wenn ein Magnetfeld in der Richtung senkrecht zur Richtung des Stromflusses angelegt wird.
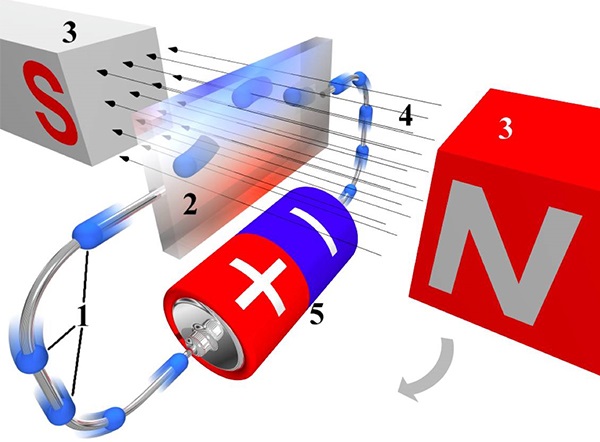
Wenn das an den Leiter angelegte Magnetfeld in der durch den Pfeil oben gezeigten Richtung mit dem Stromflusspfad als Achse gedreht wird, ändert sich die Hall-Potenzialdifferenz aufgrund der Änderung des Winkels zwischen dem Magnetfeld und dem Leiter Der Änderungstrend der Potentialdifferenz ist eine Sinuskurve. Basierend auf der Spannung auf beiden Seiten des stromführenden Leiters kann daher der Drehwinkel des Magnetfelds umgekehrt berechnet werden. Dies ist der grundlegende Funktionsmechanismus eines magnetischen Encoders bei der Messung der Rotationspositionsrückmeldung.
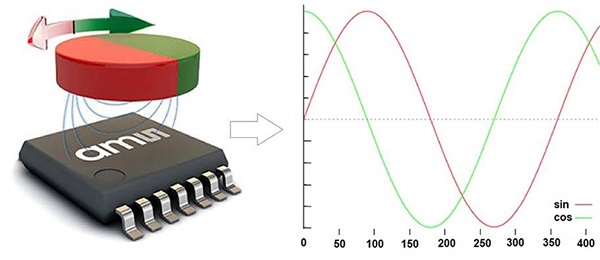
Ähnlich dem Prinzip, dass der Resolver zwei Sätze zueinander senkrechter Ausgangsspulen verwendet, sind auch im magnetischen Encoder zwei (oder zwei Paare) Hall-Induktionselemente mit zueinander senkrechten Stromrichtungen erforderlich, um die eindeutige Übereinstimmung zwischen der Drehposition des Magnetfelds sicherzustellen und der Ausgangsspannung (Kombination).
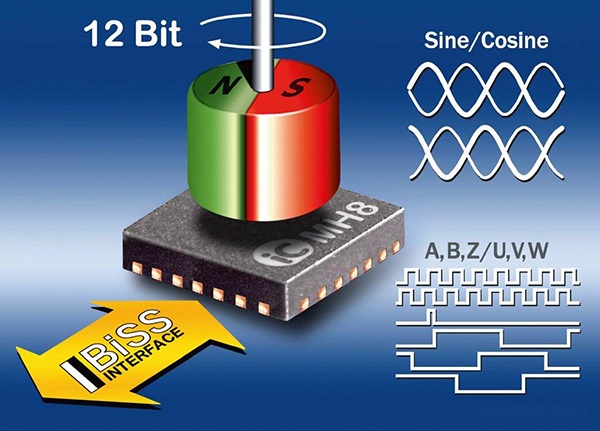
Heutzutage weisen Hall-Sensoren (Chips), die in magnetischen Encodern verwendet werden, im Allgemeinen einen hohen Integrationsgrad auf, der nicht nur Hall-Halbleiterkomponenten und zugehörige Signalverarbeitungs- und Regelschaltungen integriert, sondern auch verschiedene Arten von Signalausgangsmodulen, wie z. B. Sinus- und Cosinus-Analog Signale, digitale Rechtecksignale oder Bus-Kommunikations-Ausgabeeinheiten.
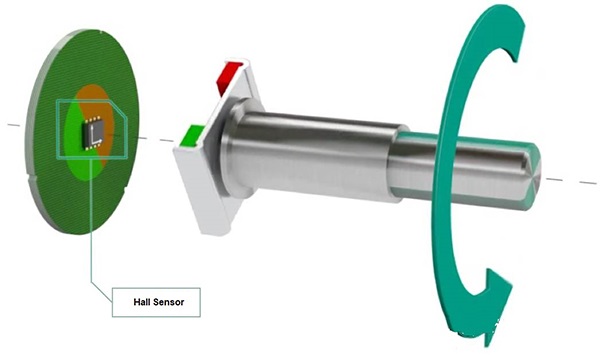
Installieren Sie auf diese Weise einen Permanentmagneten wie einen gesinterten Neodym-Magneten, der ein Magnetfeld am Ende der Drehwelle des Encoders erzeugt, platzieren Sie den oben erwähnten Hall-Sensor-Chip auf einer Leiterplatte und nähern Sie sich dem Permanentmagneten am Ende des Encoders Welle entsprechend bestimmten Anforderungen (Richtung und Abstand).
Durch die Analyse des vom Hall-Sensor über die Leiterplatte ausgegebenen Spannungssignals kann die Drehposition des Encoder-Rotors ermittelt werden.
Der Aufbau und das Funktionsprinzip des Magnetkodierers entscheiden über die besonderen Anforderungen an diesen Permanentmagneten, z. B. Magnetmaterial, Magnetform, Magnetisierungsrichtung usw. Normalerweisediametral magnetisierter Neodym-MagnetEine Scheibe ist die beste Magnetoption. Ningbo Horizon Magnetics hat Erfahrung in der Belieferung zahlreicher Hersteller von Magnetcodierern mit bestimmten Größendiametrale Neodym-ScheibenmagneteNeodym-Scheibenmagnete mit einem Durchmesser von 6 x 2,5 mm und einem Durchmesser von 10 x 2,5 mm sind die beliebtesten Modelle.
Es ist ersichtlich, dass der magnetische Encoder im Vergleich zum herkömmlichen optischen Encoder keine komplexe Codescheibe und Lichtquelle benötigt, die Anzahl der Komponenten geringer ist und die Erkennungsstruktur einfacher ist. Darüber hinaus bietet das Hall-Element selbst auch viele Vorteile, wie z. B. feste Struktur, geringe Größe, geringes Gewicht, lange Lebensdauer, Vibrationsfestigkeit, keine Angst vor Verschmutzung durch Staub, Öl, Wasserdampf und Salznebel oder Korrosion.
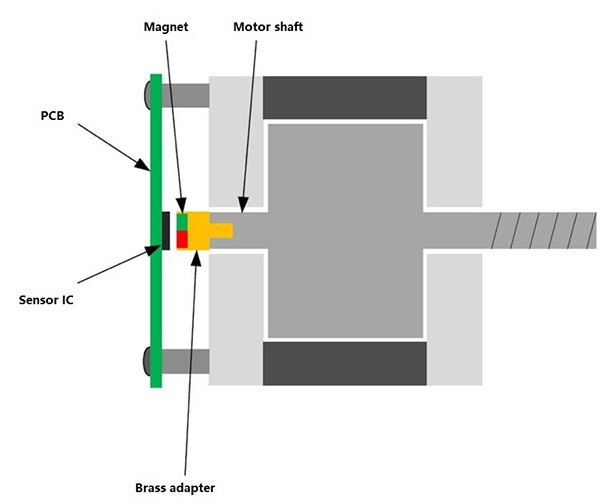
Wenn die magnetische Encoder-Technologie auf die Drehpositionsrückmeldung des Elektromotors angewendet wird, wird diegesinterter NdFeB-MagnetzylinderDer magnetische Encoder kann direkt am Ende der Motorwelle montiert werden. Auf diese Weise kann das Übergangskupplungslager (oder die Kupplung), das bei der Verwendung des herkömmlichen Feedback-Encoders erforderlich ist, entfallen und eine berührungslose Positionsmessung erreicht werden, wodurch das Risiko eines Encoderausfalls (oder sogar einer Beschädigung) aufgrund der Vibration der mechanischen Welle währenddessen verringert wird der Betrieb des Elektromotors. Daher trägt es dazu bei, die Stabilität des Elektromotorbetriebs zu verbessern.
Zeitpunkt der Veröffentlichung: 21.07.2022